 Disable/Enable big cursor white
Disable/Enable big cursor white Disable/Enable big cursor black
Disable/Enable big cursor black

עולם הטבע בשירות הטכנולוגיה: מחקרי ביומימיקרי והשראה מהטבע באוניברסיטת תל אביב
עולם הטבע הוא מקור השראה למגוון פיתוחים טכנולוגיים חדשניים ופורצי דרך. במהלך מיליוני שנות אבולוציה התפתחו בטבע מנגנונים מתוחכמים, שאותם בוחנים חוקרי אוניברסיטת תל אביב השואפים לבנות רובוטים חכמים ויעילים יותר, כלי טיס משוכללים ועוד.
התחום הנקרא ביומימיקרי עוסק ביצירת מערכות מלאכותיות אשר מחקות את פעולתם של מנגנונים ביולוגיים טבעיים. השראה מהטבע היא תחום מחקר רחב יותר, ששואב השראה ממנגנונים טבעיים אך לא מחקה אותם בדייקנות. באוניברסיטת תל אביב מתבצעים פרויקטים מחקריים בין-תחומיים רבים, המשלבים יחידות אקדמיות שונות, החל מהנדסה ומדעי החיים ועד מדעי המוח, ועוסקים בביומימיקרי ובהשראה מהטבע.
הנדסה פוגשת ביולוגיה: שיתוף פעולה כבסיס לחדשנות
הטבע הוא מעבדת פיתוח אולטימטיבית, והשאיפה ללמוד ממנו ולפתח כלים לשירות האדם מחייבת שיתוף פעולה הדוק בין ביולוגים למהנדסים. כדי לתרגם תופעה ביולוגית למערכת טכנולוגית פונקציונלית נדרש שילוב של מומחים ממגוון תחומים: בוטניקה, זואולוגיה, מדעי החומר, מתמטיקה, הנדסה, מדעי המחשב ועוד. לדוגמה, הפיתוחים באוניברסיטה בנושאי מעוף ויכולות ניווט של בעלי חיים מובלים על ידי חוקרים מבית הספר לזואולוגיה בפקולטה למדעי החיים יחד עם מומחים מבית הספר להנדסה מכנית או מומחים לאווירונאוטיקה. שיתופי פעולה אלו, המקבלים השראה ממיליוני שנות אבולוציה, מובילים לפריצות דרך טכנולוגיות.
Robat: ניווט באמצעות גלי קול בהשראת העטלף
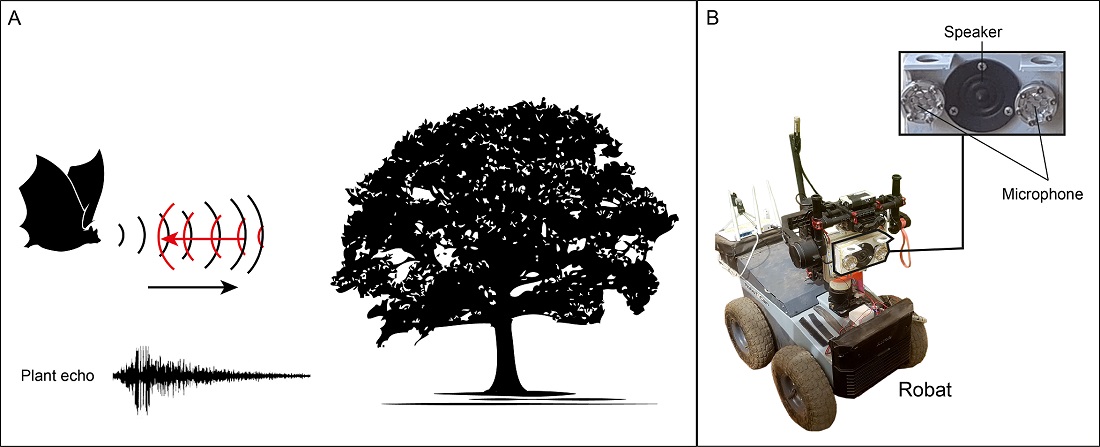
הכירו את הרובוטלף (Robat): רובוט אוטונומי המנווט באמצעות גלי קול, ממש כמו עטלף. בני האדם מנווטים את דרכם בעיקר בעזרת חוש הראייה, ולכן גם הרובוטים שפותחו עד היום מנווטים בעיקר באמצעות חישת גלי אור (מצלמות וקרני לייזר). אולם ניווט בעזרת גלי אור עלול להוות חיסרון בסביבות של חושך, אבק, או עשן (למשל, מתחת להריסות או בזמן שריפה), בסביבה עם קירות שקופים או בסבך שיחים.
רובוטלף – רובוט מנווט בהשראת עטלף
העטלפים, לעומת זאת, משתמשים במנגנון הנקרא איכון הד (echolocation) כדי למפות את סביבתם. הם מפיקים גלי קול בתדרים גבוהים ומעבדים את המידע שמוחזר אליהם מהעצמים בסביבה. הרובוטלף, שפיתוחו נמשך כשנתיים, הוא הרובוט האוטונומי הראשון בעולם שנבנה בהשראת עטלפים כדי לנווט ולמפות סביבה באמצעות איכון הד בלבד. הוא מצויד ברמקול על-קולי ("פה"), המפיק צלילים בתדרים אופייניים לעטלף, ובזוג מיקרופונים ("אוזניים") הקולטים תדרים על-קוליים. בעזרת הצלילים הללו בלבד, הרובוטלף מגדיר את גבולות העצמים הנמצאים בסביבתו, מסווג אותם ומייצר מפה מדויקת של הסביבה.
הפרויקט, שתוצאותיו פורסמו בכתב העת PLOS Computational Biology, הוא תוצר של שיתוף פעולה בין ד"ר גבור קושה מבית הספר להנדסה מכנית ופרופ' יוסי יובל מבית הספר לזואולוגיה בפקולטה למדעי החיים ומבית הספר סגול למדעי המוח. החוקרים מאמינים כי לפיתוח זה עשויות להיות השלכות משמעותיות בפיתוח רובוטים מרובי-חושים, וצופים כי בעתיד אפשר יהיה לבנות רובוטלפים שיוכלו לנווט יחד כקבוצה, כפי שפועלים העטלפים בטבע, ואף לבנות רובוטלף שאף יעוף כעטלף.
GrowBot: תנועה על ידי גדילה בהשראת צמחים
כיוון חדשני נוסף באוניברסיטת תל אביב שואב השראה מעולם הצומח. מעבדתה של פרופ׳ יסמין מרוז משתתפת בפרויקט בינלאומי ובין-תחומי בשם GrowBot, העוסק בפיתוח רובוט שמסוגל לטפס ולהתקדם בשטח באמצעות צמיחה, בהשראת צמחים מטפסים כמו גפן וקיסוס.

קנוקנות צמחים. השראה לרובוט מטפס
רוב הרובוטים נעים באמצעות גלגלים או רגליים, ורובם מתקשים להתמודד עם מכשולים לא רציפים, כמו סלעים, בורות וחללים. צוות הפרויקט חיפש השראה לתנועת רובוטים במקום לא צפוי: צמחים מטפסים. צמחים מתקדמים על ידי גדילה, כלומר הוספת חומר, כאשר השורש מקובע למקום והגדילה נעשית בקודקוד הגדילה, המרוחק מהשורש. צמחים מטפסים מגיבים לסביבתם ופותרים בעיות תנועה באמצעות גדילה לכיוון המתאים. הם קלי משקל ובעלי מבנה דק, מעגנים את עצמם בעצמים העומדים בדרכם ומסוגלים להגיע לאורך של עד 200 מטר.
GrowBot, הרובוט שפותח על ידי צוות החוקרים בהשראת תהליך הגדילה של צמחים, נע על ידי "גדילה"; הוא משתמש בהדפסת תלת-ממד כדי לשכפל את עצמו וכך להוסיף חומר. במעבדתה של פרופ׳ מרוז מבצעים ניסויים כדי לחקור איך צמחים מטפסים מנווטים ומקבלים החלטות, וכך מפתחים מודלים מתמטיים שישולבו ב"מוחו" של הרובוט. מודלים אלה יאפשרו לרובוט לעבד מידע סביבתי שנאסף באמצעות מערכות חישה, ולגבש אסטרטגיית צמיחה אופטימלית בהתאם לתנאי השטח. החוקרים מקווים שרובוטים מסוג זה יוכלו לחדור להריסות מבנים, לסייע בחקר אתרים ארכיאולוגיים או אתרים מסוכנים אחרים ועוד.
עולם החרקים: השראה לכלי טיס זעירים
גם היצורים המעופפים הזעירים ביותר הם מקור השראה לפתרונות הנדסיים מבריקים. מחקרים שנערכים באוניברסיטת תל אביב מתמקדים בביומכניקה של תעופת בעלי חיים במטרה לחקות יצורים מעופפים כדי לתכנן כלי טיס משופרים.
דוגמה בולטת לכך היא מחקר שנערך במעבדתו של פרופ' גל ריבק מבית הספר לזואולוגיה, שחשף את סוד ההמראה של כנימת עש הטבק – חרק זעיר שגודלו כמילימטר. באמצעות צילום הכנימה במצלמות וידאו מהירות גילו החוקרים כי היא אינה ממריאה בנפנוף כנפיים, אלא משגרת את עצמה לאוויר בכוח אדיר (פי 34 מתאוצת הכבידה). אף על פי שהשיגור מערער את יציבותה, הכנימה מצליחה להתייצב באופן מיידי כאשר כנפיה עדיין סגורות בצמוד לגוף. המודל הממוחשב שבנו החוקרים הראה כי קצות הכנפיים הם האיבר האחראי לייצוב: המשטח הבולט של הכנף המקופלת יוצר התנגדות אוויר שעוצרת את תנועת הגלגול. זהו מנגנון ייצוב אוטומטי המובנה בכנפי הכנימה, ממצא משמעותי עבור מהנדסי תעופה, אשר שואפים לפתח מעופפים מלאכותיים זעירים (מזל"טים) יעילים יותר.
במחקר אחר שנערך במעבדתו של פרופ' ריבק בשילוב עם פרופ' בת-אל פנחסיק מבית הספר להנדסה מכנית מפתחים החוקרים כנפיים לרחפנים זעירים בהשראת חיפושיות. הכנפיים מודפסות בתלת-ממד, אך משמרות תכונות מכניות ואווירודינמיות הייחודיות לחרקים ומשפרות את יעילות תעופתם.
בסרטון: המראה של כנימת עש
פרופ' אמיר אילי מבית הספר לזואולוגיה חוקר את מנגנון התעופה של הארבה במטרה להשתמש בו לפיתוח מזל"ט מסוג חדש. במעבדתו של אילי בוחנים את הפעילות המוחית המנחה את תעופת הארבה, ומנסים לפענח כיצד מידע סביבתי משפיע על מערכת העצבים והשרירים ליצירת תמרוני פנייה. עוד באותה מעבדה חוקרים את אופן ההליכה היעיל להפליא של תיקנים במטרה לסייע למהנדסי רובוטיקה לתכנן רובוטים שיכולים ללכת בזריזות וגמישות על מגוון משטחים, אולי אפילו על פני המאדים.
מבט קדימה
באמצעות שילוב ידע ביולוגי מעמיק עם מודלים מתמטיים ופיתוחים הנדסיים, אוניברסיטת תל אביב ממצבת את עצמה כמובילת דרך בחזית מחקרי הביומימיקרי וההשראה מהטבע. בין אם מדובר ברובוט ש"שומע" את דרכו, מכונה שמתקדמת על ידי צמיחה או כלי טיס זעיר המצויד במנגנון המראה שפותח בהשראת כנימה, המדענים באוניברסיטת תל אביב מוכיחים כי הפתרונות הטכנולוגיים המתקדמים ביותר כבר נמצאים סביבנו, מחכים שנגלה את סודם.
באטמן – מאחוריך! ה"רובוטלף" מסתובב חופשי באוניברסיטת תל אביב, באתר אוניברסיטת תל אביב
לטפס למעלה: הרובוט שמקבל השראה מצמחים מטפסים, באתר אוניברסיטת תל אביב
סוד התעופה של כנימת עש הטבק, באתר אוניברסיטת תל אביב
Eliakim, I., Cohen, Z., Kosa, G., & Yovel, Y. (2018). A fully autonomous terrestrial bat-like acoustic robot. PLoS computational biology, 14(9), e1006406.
Ribak, G., Dafni, E., & Gerling, D. (2016). Whiteflies stabilize their take-off with closed wings. Journal of Experimental Biology, 219(11), 1639-1648.
Mordoch, L., Sabag, E., Ribak, G., & Pinchasik, B. E. (2024). Insect‐Inspired Drones: Adjusting the Flapping Kinetics of Insect‐Inspired Wings Improves Aerodynamic Performance. Advanced Intelligent Systems, 6(11), 2400173.



